Abstract:
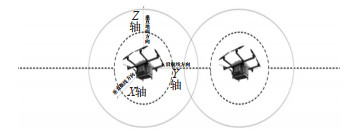
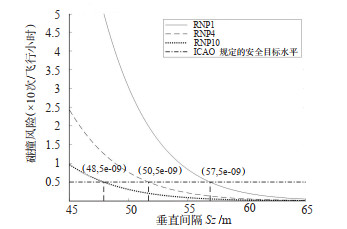
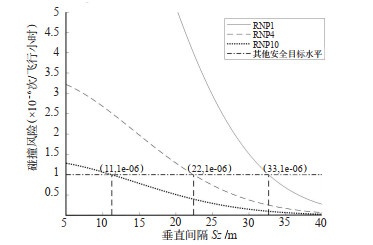
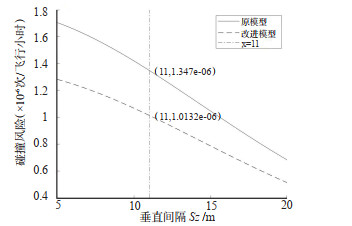
The multi-rotor electric vertical take-off and landing vehicle (eVTOL) is a future vehicle, that has been a research hotspot in recent years. However, the limited accuracy of vertical positioning and potential dangers of crossing flight hamper the establishment of the operational separation standard (OSS) for eVTOL, which makes it far from the application in practice. To explore the OSS for eVTOL, the shape of the eVTOL is considered, which is wider at the bottom and taper at the top, an improved Event-based vertical collision model is developed, and the safety evaluation method for eVTOL is proposed based on the improved model. The proposed method considers the main characteristics of eVTOL such as the shape, navigation accuracy, operation feature, positioning error, flight speed, speed error, etc., uses a conical frustum collision box instead of the cuboid box in the original model, and introduces relative speed, probability of lateral overlap and probability of vertical overlap as the parameters in safety evaluation method, capturing the characteristics of the eVTOL, reducing the computational redundancy, and enhancing the accuracy of the collision model. To demonstrate the proposed model and method, the multi-rotor eVTOL EHang 216-S is taken as an example, and the vertical separation minimum (VSM) under different target levels of safety (TLS) and navigation accuracy are calculated. The results show that: ① the reduction of the TLS and the navigation accuracy will lead to the reduction of the VSM. ② When the TLS is set as 1×10-6 times/flight hour and the navigation accuracy is set as required navigation performance of 10 (RNP10), VSM can be reduced to 11 meters. ③ When the navigation accuracy is RNP10 and the VSM is 11 meters, the calculated collision risk by the proposed method will be lower than the original method by 24.78%. It indicates that the introduction of the conical frustum collision box in the safety evaluation for eVTOL would result in a more accurate and reasonable calculation of collision risk than the original method, providing theoretical support for the establishment of vertical separation standards for eVTOL.