01 A Cooperative Map Matching Algorithm Applied in Intelligent and Connected Vehicle Positioning
02 Indoor Sign-based Visual Localization Method
03 Intelligent Vehicles Localization Based on Semantic Map Representation from 3D Point Clouds
04 Companion Relationship Discovering Algorithm for Passengers in the Cruise Based on UWB Positioning
05 An Overview of Traffic Management in "Automatic+Manual" Driving Environment
06 An Analysis of Injury Severities in School Bus Accidents Based on Random Parameter Logit Models
07 An Image Generation Method for Automated Driving Based on Improved GAN
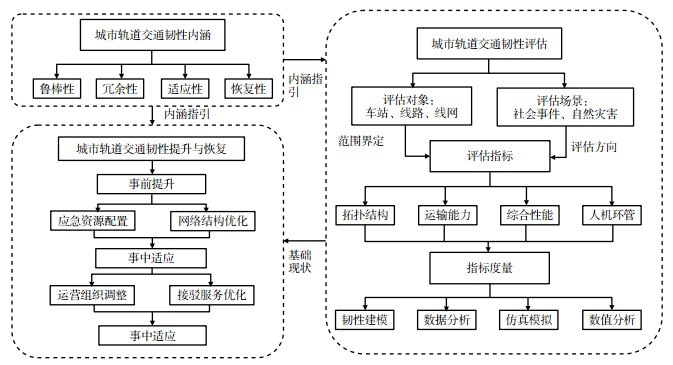
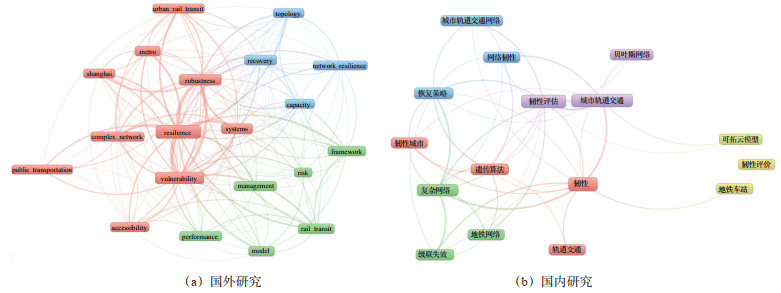
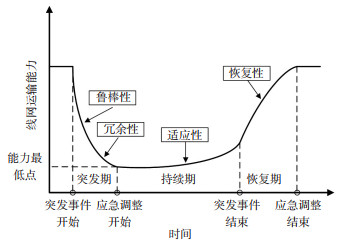
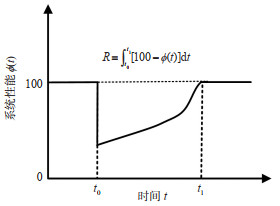
An urban rail transportation system with high-level resilience is able to effectively respond to emergencies caused by natural disasters, human error, equipment failure, and other factors. In order to fully grasp the research trends related to the resilience of urban rail transit, the keywords and hotspots are analyzed with bibliometric analysis. Early studies focuses on the resilience of track structure, while transportation service resilience has gradually gained attention in recent years. Based on the development process of resilience concept in the fields of physics, ecology, and urban management, the connotation of urban rail transit resilience is explained. Oriented to typical social events and natural disaster scenarios, the scope of resilience evaluation is extended from stations to lines and then to networks. However, under current technological conditions, there is a trade-off relationship between the scale and granularity of resilience evaluation. The linkage mechanisms between macro/micro and dynamic/static objects are not fully explored. In terms of resilience evaluation indicators, the indicators system based on topology, transportation capacity, comprehensive performance and operation flow are summarized. The existing indicator system is able to be further enriched in terms of spatial layout, engineering conditions, facilities, equipment, staffing, management and social forces. Four typical indicator measurement methods are sorted out, which include performance curve based on resilience modeling, big data analysis, simulation and numerical analysis. The measurement results based on a single method are easily affected by factors such as the amount of data, hypothetical conditions, and indicator weights. Multiple methods should be comprehensively used to measure indicators in different types and evaluation stages. Resilience enhancement strategies for pre-prevention, in-process adaptation and post-disaster recovery are also discussed. Most existing research primarily approaches from a perspective of operational management, and related studies on post-disaster recovery of infrastructure are still in an initial exploratory stage. Future research on urban rail transit resilience is expected from four aspects: ①Improving the authenticity of emergency scenarios modeling. ②Dynamic fine-grained analysis integrating spatial and functional division of the city. ③Exploring the propagation mechanism of emergencies to characterize system internal changes. ④Verifying effectiveness of resilience evaluation and improvement methods.

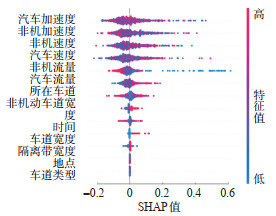
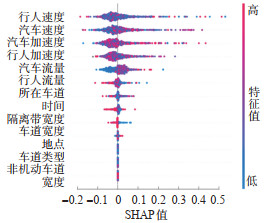
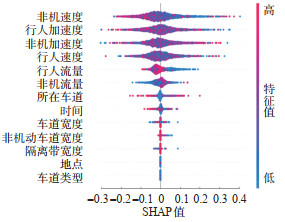
This study addresses the challenges of inadequate researches on lane-scale risk evaluation and the uncertainties in complex interactions at urban signal-controlled intersections. To this end, a comprehensive risk evaluation model is developed based on Bayesian inference and XGBoost. Specifically, this study is based on traffic video data from three intersections in Xi'an: Jixiang Village, Mingguang Road, and Qingsong Road. Two innovative risk-evaluation sets are constructed from the dimensions of temporal and spatial proximities, in which key indicators, including post-entrainment time, maximum speed, distance difference and speed difference are selected to capture dynamic risk characteristics of intersections. Further, Bayesian inference is used to develop a probabilistic evaluation method to address uncertainties in complex interactions at intersections. Next, SHAP value theory of the XGBoost model and Logistic regression are applied to analyze the significance and importance of factors influencing lane risk levels. The results show that: ①The proposed model outperforms baseline models in identifying medium and high-risk interactions. It also more accurately assesses extreme danger interactions, avoiding the overestimation observed in baseline models. ②Among the typical interactions, that between motor vehicle-bicycle, pedestrian-motor vehicle, and pedestrian-bicycle, only a small portion are classified as extreme risk, though medium-risk interactions account for 29.7%, 20.8%, and 34.3%, respectively. ③There are significant differences regarding the risk level across different lanes, with the first lane being more prone to traffic conflicts compared to the second, third, and fourth lanes. ④For all three interaction types, lane risk is mainly influenced by speed, acceleration, and traffic volume. In motor vehicle-bicycle interactions, the highest risk occurs in the first lane and on roads with narrow buffer zones, particularly during morning rush hours and on right-turn lanes. Pedestrian-motor vehicle interactions are primarily influenced by speed and traffic volume, with higher risks in the first lane. For pedestrian-bicycle interactions, narrower bicycle lanes increase the risk of conflicts.
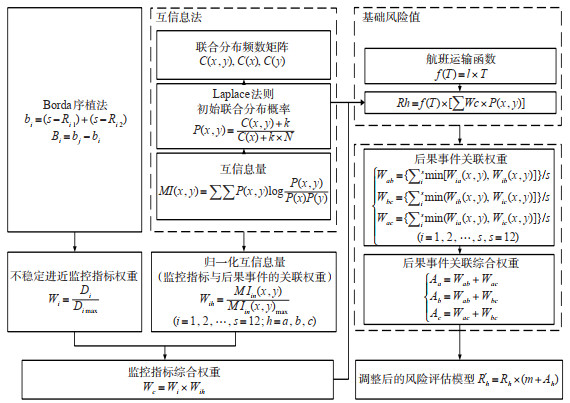
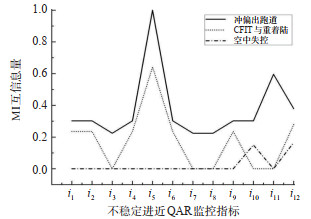
Unstable approaches can easily lead to typical consequence events. This study develops a quantitative risk assessment model to evaluate the risks associated with unstable approaches. Quick access recorder (QAR) data and approach risks are analyzed. Key QAR flight parameters indicative of unstable approaches are selected as monitoring indicators. Twelve monitoring indicators are identified to reflect the state of unstable approaches. The Borda count method is used to rank the monitoring indicators. Based on the ranking results, the study calculates how much each monitoring indicator influences unstable approach events. Potential severe consequences of unstable approaches are analyzed to identify typical consequence events. A risk assessment model is constructed based on the mutual information method from information entropy theory, incorporating the following improvements: ①The mutual information method and the Borda count method are integrated to define a weight that comprehensively reflects the monitoring indicators. This approach overcomes the limitations of using either method in isolation for weight determination. ②Laplace smoothing is utilized to handle the zero-frequency problem in the dataset. Information loss is mitigated, and a necessary complement is provided to the mutual information method, particularly for scenarios characterized by limited sample sizes. ③The correlation between consequence events is considered, and the base risk value is adjusted accordingly. The model is validated using a case study. The results show that using QAR data collected from Airline A in 2019, the model assesses the risk values of runway excursion, CFIT and hard landing, and loss of control in-flight as 4.609 5, 2.062 8, and 0.146 8, respectively. This risk ranking is consistent with the data proportion ranking published by the International Air Transport Association. Indicating that the model results align with actual operational situations. The model's risk rankings are found to be consistent across different aircraft type and years. This consistency is observed when comparing data from Airlines A and B. One hundred experiments are simulated under four different environments. The results show that the risk value trends and distributions share similar characteristics. The consistency between the risk rankings in the simulated and real environments reaches 90% overall. The risk of runway excursion fluctuates with changing conditions. The high-risk value of loss of control in-flight may indicate a serious safety event. The risk of CFIT and hard landing shows little fluctuation, with a uniform distribution, indicating a moderate and predictable risk.
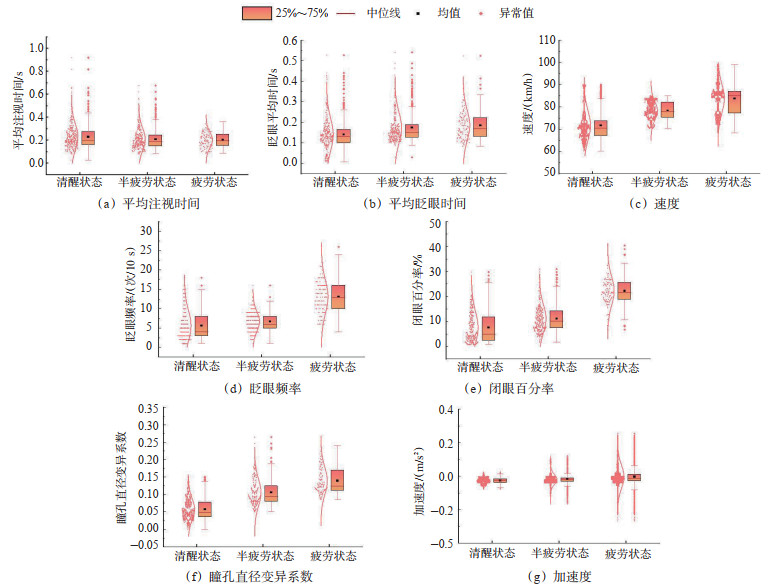
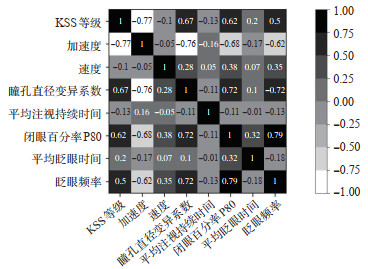
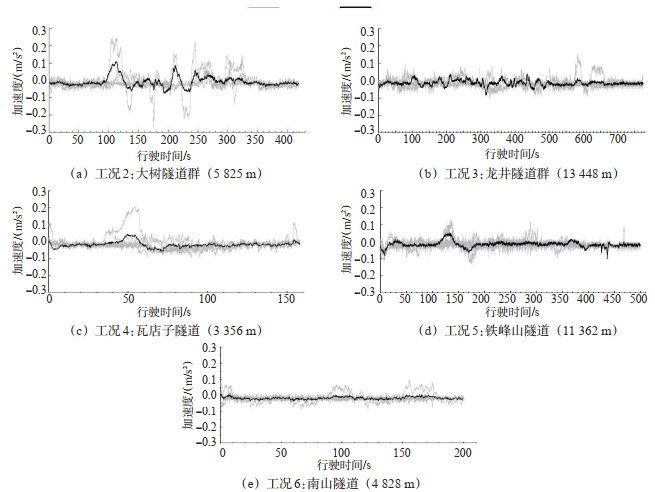
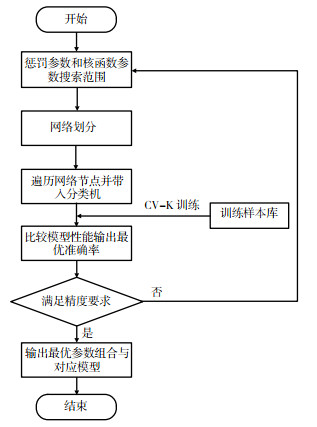
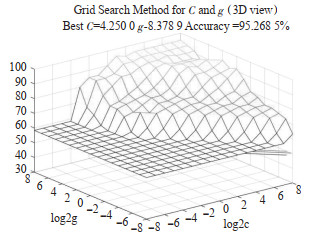
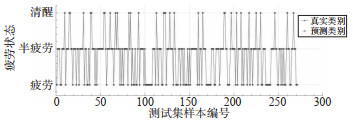
To investigate the evolution of driving fatigue in extra-long tunnels and its influencing factors, multi-source data from real-vehicle experiments are utilized to classify and identify driving fatigue, as well as to analyze the relationship between fatigue levels and influencing factors. Through significance tests of differences and correlation analysis, the percentage of eyelid closure over the pupil over time (PERCLOS) P80, the variable coefficient of pupil diameter, and acceleration are selected as key fatigue sensitivity indicators, and their changing patterns with accumulated driving time are examined. To construct a driving fatigue classification model, fatigue levels, based on the subjective fatigue detection results from the Karolinska sleepiness scale (KSS), are categorized into awake, semi-fatigued, and fatigued states. A multi-class classifier method is then employed to combine and classify these fatigue states. The grid-search method (GS) is utilized for parameter optimization, and the selected fatigue sensitivity indicators are used as input variables to establish a multi-class support vector machine model (GS-M-SVMs) for fatigue state classification. Following this, an ordinal multi-class Logistic model is developed to explore the relationship between driving fatigue levels and influencing factors in extra-long tunnels. The results indicate that the changing patterns of fatigue sensitivity indicators effectively capture the evolution of driving fatigue. The GS-M-SVMs model achieved a classification accuracy of 90.75%, indicating strong performance in fatigue level detection. Both accumulated driving time and tunnel length significantly influence driving fatigue levels, with regression coefficients of 2.634 and 0.395, respectively. This indicates that accumulated driving time is the primary factor contributing to increased fatigue in extra-long tunnels, while factors such as tunnel illumination and alignment do not significantly impact fatigue levels.



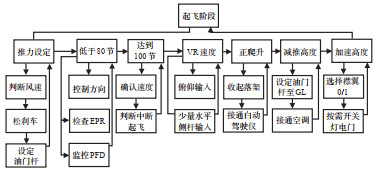
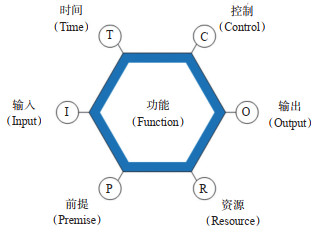
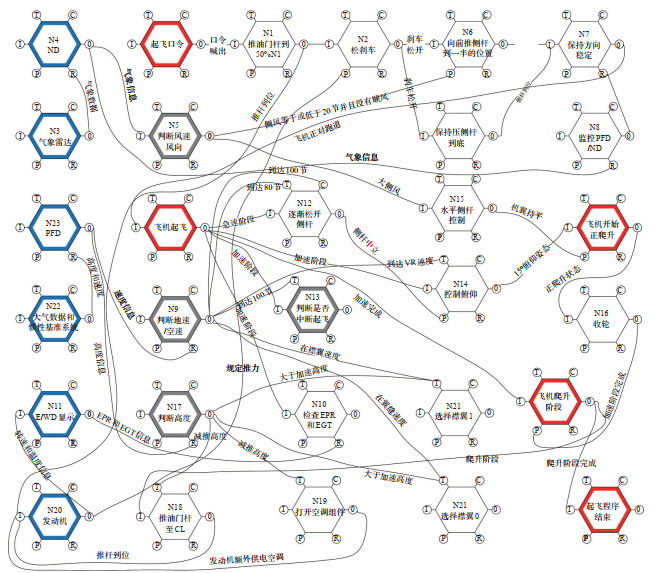
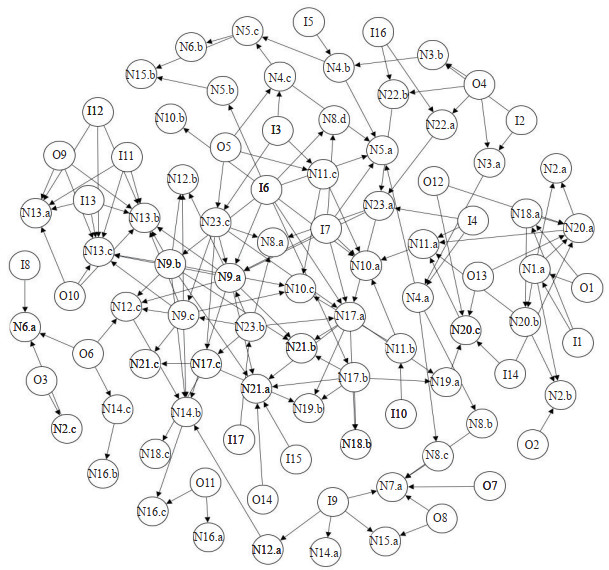
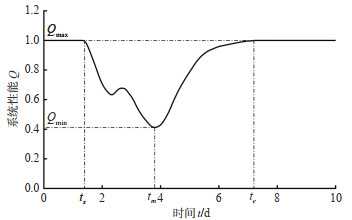
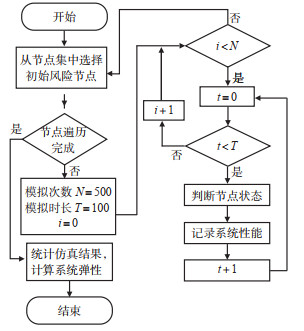
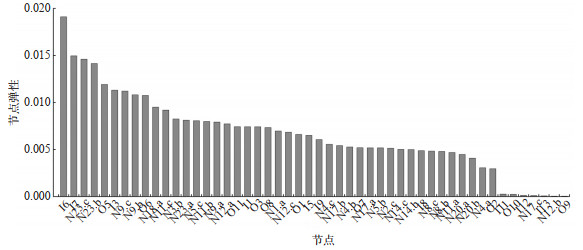
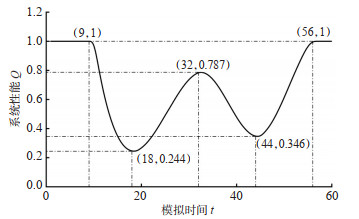
To assess the risk of a human-machine system of civil aircraft cockpits during the take-off phase and identify the dangerous nodes, this paper explores a resilience-based risk analysis method. The method employs the hierarchical task analysis (HTA) and the functional resonance accident model (FRAM) to identify the main functions of the human-machine system, and analyze their interconnections, thereby constructing a system function network model. A risk propagation network throughout the system function network is developed by analyzing the intrinsic and extrinsic influencing factors, and a susceptible-infectious-recovered (SIR) model is introduced to simulate the propagation of risk within this network. An improved cognitive reliability and error analysis method (CREAM) is developed to identify system failure modes and common performance conditions, thereby calculating probabilities of failure, transmission, and recovery within the proposed SIR model. Aiming at the dynamic propagation of risk, an enhanced resilience model is developed to accurately reflect system performance and resilience, which considers the timing of system disturbances and recovery. To validate the proposed method, an example of the take-off process is analyzed, and results show that: ①4 major risk nodes, 7 general risk nodes, 33 low-risk nodes, and 48 minimal-risk nodes are identified. ②In the first three categories of nodes, human errors account for 100%, 42%, and 45% respectively. ③Human factors, including pilot fatigue and visual load, are more likely to form incidents. ④These findings are corroborated with the statistical analysis results. Furthermore, the proposed method analyzes the performance change process of the human-machine system, which reveals challenges in system recovery and the tendency towards secondary risks. In summary, conclusions above confirm the effectiveness of the resilience-based analysis method proposed in this paper, emphasizing the need for risk management strategies.
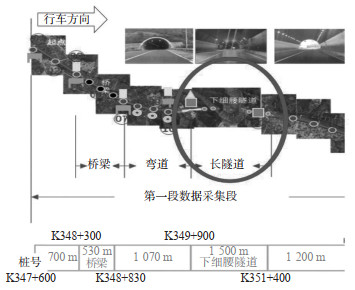
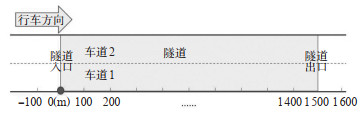
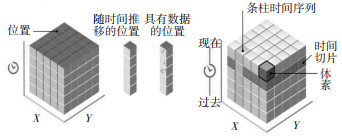
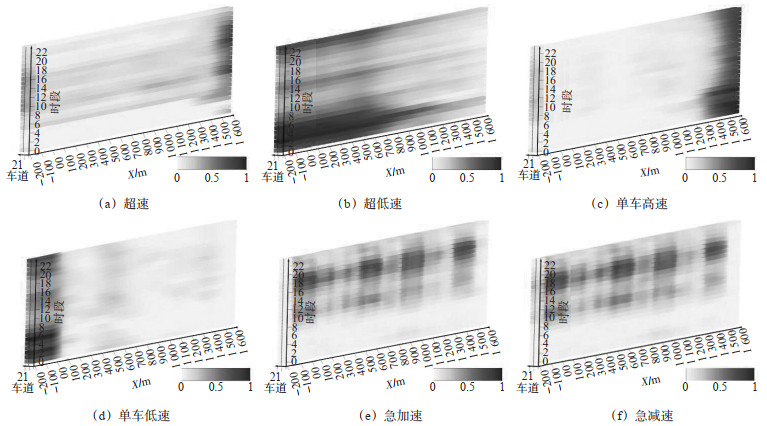
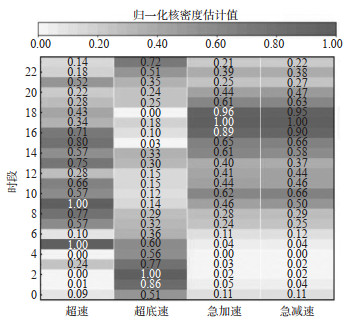
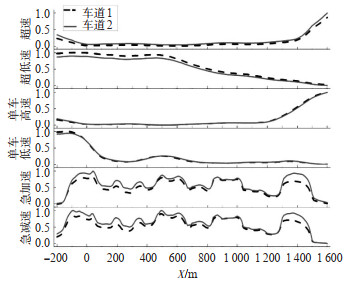
To pinpoint the patterns, locations, and timings of longitudinal risky driving behaviors in tunnel sections, enhancing the ability of traffic management departments to proactively prevent accidents, this study addresses the limitations of conventional separate spatio-temporal analysis dimensions by developing a spatio-temporal kernel density estimation model (STKDE). The model's optimal bandwidth is determined using least squares cross-validation (LSCV).A method for identifying longitudinal risky driving behaviors based on trajectory data is constructed, extracting spatio-temporal locations for four risky driving behaviors: speeding, extreme low speed, rapid acceleration, and rapid deceleration. By partitioning the spatio-temporal domain of the study area into units, STKDE is applied to compute the spatio-temporal kernel density estimation value, ψ, within each unit. The results of STKDE are visualized using a space-time cube model (ST-Cube). An empirical analysis based on high-precision trajectory data from the Xiaxiyao Tunnel reveals that high-speed driving behavior frequently occurs within 100 meters of the tunnel exit, with speeding peaking at 16:00 and 09:00. Low-speed driving behavior is frequent within 200 meters before the tunnel entrance, with extreme low speed peaking at 02:00 and 14:00. Within 100 meters before entry and throughout the first 1500 meters of the tunnel, the ψ values for rapid acceleration and deceleration remain above 0.5, indicating high-frequency occurrences.. Additionally, every 150~200 meters within the tunnel, these two types of sudden speed changes show simultaneous fluctuations, but significantly decrease and are no longer frequent once exiting the tunnel. A comparison with conventional spatio-temporal analysis methods shows that the STKDE method, combined with ST-Cube, achieves integrated spatio-temporal feature analysis and provides a quantifiable estimation of the likelihood of risky driving behaviors across the entire spatio-temporal domain, demonstrating a particular advantage in characterizing rapid acceleration and deceleration behaviors.



The existing studies of causal analysis on accidents severity of delivery riders mainly focus on partial fac-tors such as rider, behavior, time, space, road, environment, and accident characteristics. The differences are not quantified in the impacts of different factors on the severity of accidents from the seven aspects above, without con-sidering factors such as takeaway type, number of entrances, angle of intersection, comfort index, and other factors. In addition, when there are both unordered and ordered binary or multi-categorical variables in the independent vari-ables, the established models are limited by the parallel-lines (PL) assumption, and fail to own the flexibility of al-lowing some variables to comply, while others violate this assumption. A total of 1 473 accidents related with deliv-ery riders in Xi'an are selected to analyze the severity distribution and the spatiotemporal distribution. A total of 25 potential influencing factors are selected from the seven aspects. A partial proportional odds (PPO) model is developed to clarify the significant influence of various factors on the rider injury severities in delivery crashes and the vi-olation status of the PL assumption. The corresponding marginal effects are carried out to quantify the differences between and within the contributing factors. The results show that there is a"double peak"phenomenon in the tem-poral distribution of the delivery-involved crashes, and the crash density in urban areas is higher than in suburban ar-eas. The proportion of minor injuries to riders on road sections (35.57%) is higher than at intersections (31.76%). The PPO model performs better than the ordered Logit model and the generalized ordered Logit model. The deliv-ery type, season, location, number of entrances, intersection angle, road surface, weather, and comfort index all fol-low the PL assumption. There are significant differences in the crash severity among different significant factors. Traffic violations such as running red lights, going in the wrong direction, and speeding have the greatest impacts on the rider crash severity, with the maximum absolute value of the marginal effects exceeding 51%. However, some unexplored factors such as number of entrances, intersection angles, bicycle lane, delivery type, and comfort index significantly affect the severity (8% to 37%).


Journal of Transport Information and Safety
(Founded in 1983 bimonthly )
Former Name:Computer and Communications
Supervised by:Ministry of Education of P. R. CHINA
Sponsored by:Wuhan University of Technology
Network of Computer Application Information in Transportation
In Association With:Intelligent Transportation Committee of China Association of Artificial Intelligence
Editor-in-Chief:ZHONG Ming
Edited and Published by:Editorial Office of Transport Information and Safety
Address:No. 1178,Heping Avenue, Wuchang, Wuhan, CHINA
Postcode:430063
Tel:027-86580355
E-mail:jtjsj@vip.163.com
Website:http://www.jtxa.net/
Postal Code:38-94
Domestic Issue:
CN 42-1781/U
Publication No.:ISSN 1674-4861
- Chinese Core Journal in “Integrated Transportation” category
- Chinese Science Citation Database (CSCD)
- Core Science and Technology Journals
- Chinese Scientific and Technological Papers and Citations (CSTPCD)
- Class A of Research Center for Chinese Science Evaluation (RCCSE)
- Chinese Academic Journal Comprehensive Evaluation Database (CAJ-CED)
- Chinese Core Journals (Selection) Database
- Chinese Scientific and Technological Periodicals Database
- China National Knowledge Infrastructure (CNKI)
- Chinese Academic Journals (CAJ-CD)
- Chinese Lifelong Education Academic Research Database
- Japan Science and Technology Agency (JST)
- World Journal Clout Index Report (2020 STM)
