Abstract:
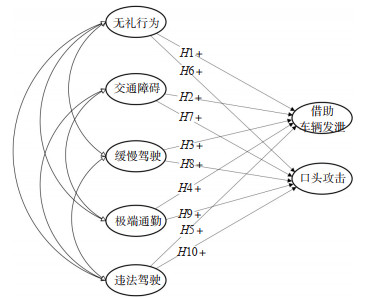
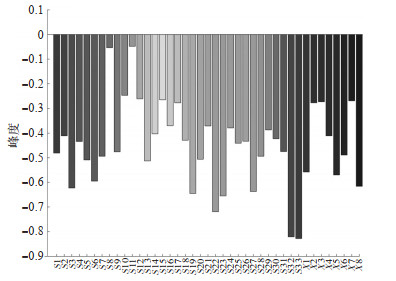
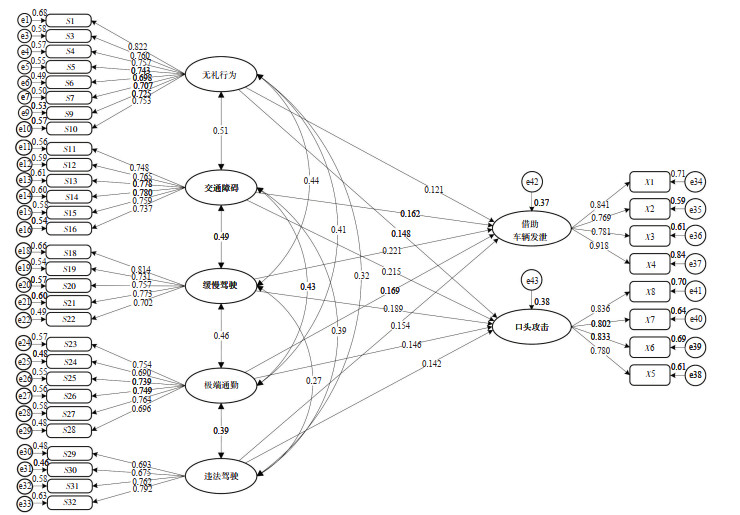
The extreme commuting population (individuals with commuting time exceeding 60 minutes) is susceptible to driving anger due to prolonged and high-stress commuting environments, which can adversely affect traffic safety. This study focuses on the phenomenon of "road rage" among extreme commuters and develops a model to quantify the associations between driving anger expressions and driving anger inducements within this group. The driving anger scale for extreme commuting group (EC_DAS) and the driving anger expression inventory for extreme commuting group (EC_DAX) are designed and surveyed to a cohort of 450 commuters traveling between Yanjiao and Beijing, China. Based on the survey data, scales are revised through exploratory factor analysis and tests of reliability and validity. Next, a model of association between expressions of driving anger and inducements for extreme commuting group is developed with discourtesy, traffic obstructions, slow driving, extreme commuting, and illegal driving as exogenous latent variables, and use of the vehicle to express anger and verbal aggression as endogenous latent variables. The impact of these anger triggers on the expression of driving anger in the extreme commuting group is quantified using a structural equation model. The results are as follows: ①In the EC_DAS, the highest score is observed for slow driving (3.37), followed by extreme commuting (3.07), with illegal driving receiving the lowest score (2.95). In the EC_DAX, verbal aggression scored higher (2.99) than the use of the vehicle to express anger (2.90). ②The structural equation model exhibits a strong goodness of fit, whose results show that use of the vehicle to express anger and verbal aggression are significantly and positively influenced by driving anger inducements including discourtesy, traffic obstructions, slow driving, extreme commuting, and illegal driving. Moreover, it is noted that these factors explain a higher variance in verbal aggression (38%) than in use of the vehicle to express anger (37%). ③Additionally, slow driving, extreme commuting, and traffic obstructions emerge as the three most significant inducements of use of the vehicle to express anger, with standardized effect coefficient of 0.221, 0.169 and 0.162, respectively, while traffic obstructions, slow driving, and discourtesy are identified as the three most significant inducements of verbal aggressive, with standardized effect efficient of 0.215, 0.189, and 0.148, respectively. ④Gender and monthly income do not have significant impacts on anger levels under different driving inducements or anger expression. However, age is significantly negative-correlated with anger levels induced by discourtesy, traffic obstructions, and illegal driving. Driving experience is significantly negative-correlated with anger levels induced by extreme commuting, education level is significantly negative-correlated with anger levels induced by slow driving, and job position is significantly negative-correlated with anger levels induced by traffic obstructions.