摘要:
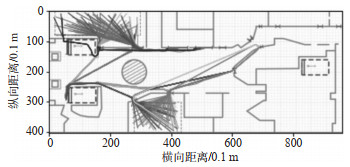
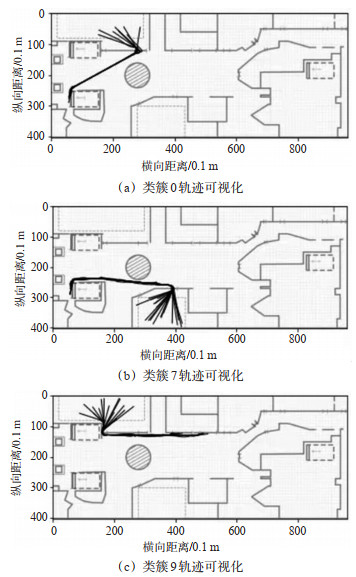
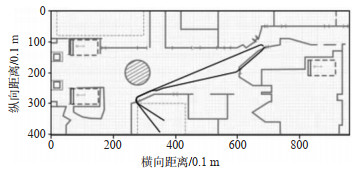
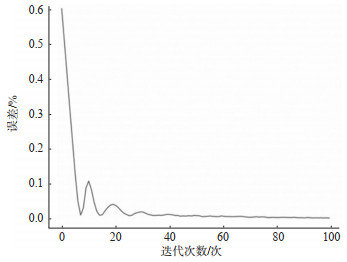
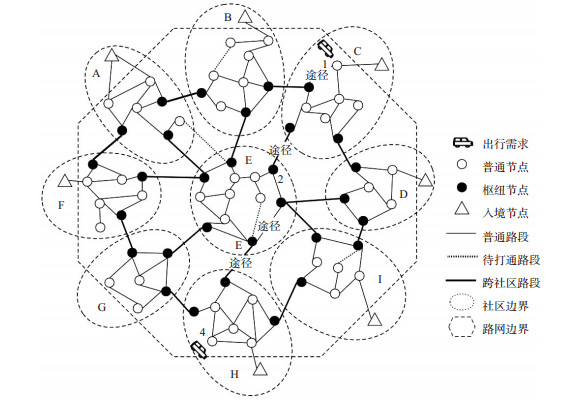
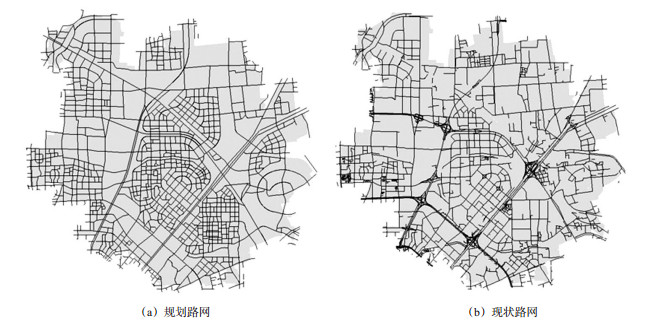
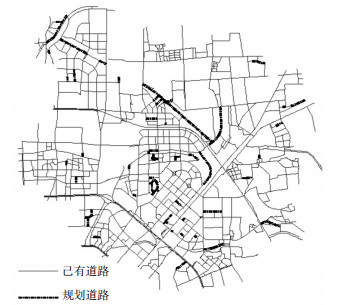
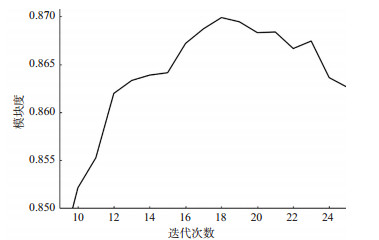
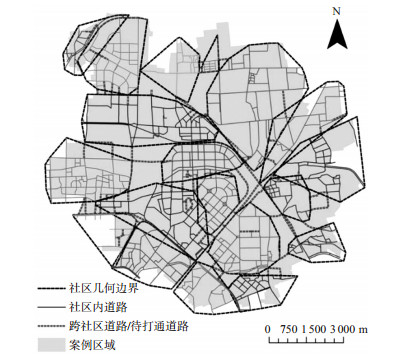
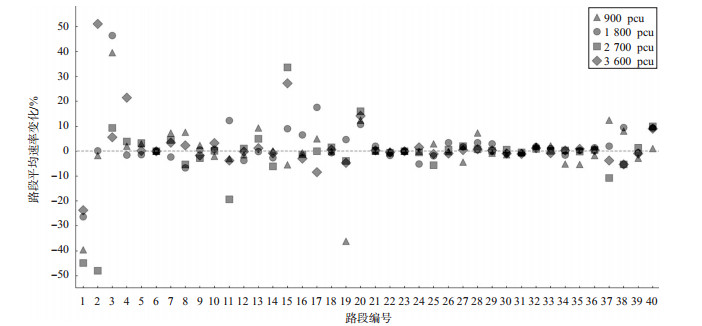
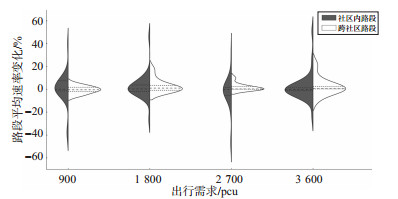
针对断头路的存在会降低道路利用率、加剧交通拥堵等问题, 构建了断头路打通在路网结构以及交通分配层面上的优化评估方法。在路网结构层面, 采用社区探测对路网进行划分, 获取社区作为受断头路影响较大的路段组合; 在交通分配层面, 将断头路打通带来的影响量化为路段平均速率的变化, 构造路网阻抗函数作为约束条件, 在社区内部进行断头路打通前后2次交通分配; 通过连续平均算法建立求解算法, 选取2次用户均衡状态的路段平均速率变化百分比作为评价指数。以北京市朝阳区路网为算例进行分析, 结果表明: ①900 pcu出行需求约束下, 断头路打通的平均指数均值小于0.6%, 表明在低负荷区域打通断头路不能带来明显的优化; ②在剩余3组较大出行需求约束下, 打通跨社区断头路的评价指数均值(3.097%, 1.833%, 2.633%)都大于打通社区内断头路(2.077%, 1.785%, 2.041%), 在市政工程中应该优先考虑打通跨社区路段。