

A Simulation Evaluation of Traffic Flow Efficiency of Urban Expressways under Cooperative Vehicle-infrastructure Scenarios
-
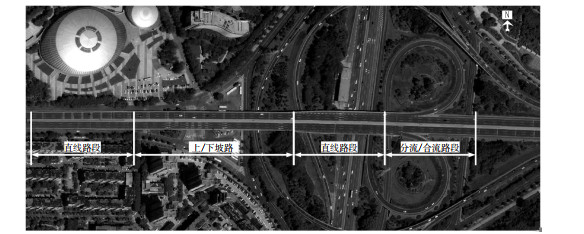
摘要: 为研究车路协同系统在不同车间信息交互水平下对快速路交通流的影响,采集并提取北京市四方桥快速路段早高峰交通流轨迹,同时分析车路协同场景下快速路车辆运行特征,实现对常规驾驶场景和信息交互场景的车辆行驶模型标定。选取期望速度行驶车辆占比、横向车距收缩比、纵向车距收缩比、通行能力拓展比对车辆运行效率进行评价,提出车辆横向偏移距离缩小比用以评价车辆空间占用状况;搭建仿真模型并进行仿真试验,分析不同信息交互水平对交通的影响程度。结果显示,车辆运行效率随信息交互水平的提升而提升,其中通行能力的提升幅度最为显著,车路协同场景下信息交互水平从4级提高到1级,道路通行能力较常规驾驶场景分别拓展了19.42%,28.06%,46.48%,74.62%,仿真时段内其余指标值提升幅度较小。车间信息交互场景下车辆行驶的横向偏移幅度缩小,且在高水平信息交互下缩小比例达到17.33%,表明相同车道宽度下车辆行驶的横向安全性提升。Abstract: This paper collects and extracts vehicle trajectory data on the road section of Sifang Bridge in Beijing during the morning peak hour to study impacts of the cooperative vehicle-infrastructure system(CVIS)on expressways under different levels of information interaction between vehicles. Driving behaviors of vehicles are analyzed under the vehicle-road collaboration scenario to calibrate parameters of the conventional driving scenes and information interaction scenes for driving models. The ratios of vehicles running at desired speed, transverse vehicle distance contraction, longitudinal vehicle distance contraction, and traffic capacity expansion are selected to evaluate operating efficiency of the vehicles, and the ratio of vehicle lateral offset distance reduction is selected as an index to evaluate space occupancy rate in the vehicle-road collaboration scenario. A simulation model is developed to analyze the impacts of different levels of information interaction on traffic flow. The results show that vehicle operation efficiency increases with an improved level of information interaction, and improvement of road capacity is the most significant. When the level of information interaction increased from level 4 to level 1, the traffic capacity is expanded by 19.42%, 28.06%, 46.48%, and 74.62%, respectively, and the rest of the index values are slightly improved during the simulation period. The vehicle lateral offset distance under the information interaction scenario is reduced, and the reduction ration is 17.33% under the scenario of level 1 information interaction. It indicating that the lateral safety of the vehicle under the same lane width is improved.
-
表 1 各类驾驶行为在车路协同场景下的变化对比表
Table 1. Comparison of changes in various driving behaviors under vehicle-road collaboration scenarios
驾驶行为 无信息交互条件下的车辆运行状态 信息交互条件下的车辆运行状态 跟车行为 驾驶员反应时间较长、车头间距较大、车辆仅可获取可视范围内车辆信息 反应时间缩短,车头间距和车辆行驶速度更稳定(无震荡)、车辆可获取附近一定范围内的车辆信息 车道变换 驾驶员反应与决策时间较长、等待变道时间较长,容易出现急加急减速行为 驾驶员反应与决策时间较短、等待变道时间较短,车速变化平缓  下载: 导出CSV
下载: 导出CSV
表 2 仿真模型参数取值
Table 2. Parameter values of the simulation model
模型 参数 1级 2级 3级 4级 现状 Wiedemann74跟驰模型 平均停车间距/m 1.0 1.5 2.0 2.5 3.0 附加安全距离/m 1.0 1.5 2.0 2.5 3.0 安全距离增加部分/m 2.0 2.5 3.0 3.5 3.0 最大前视距离/m 250 200 150 100 100 最大后视距离/m 150 120 90 60 80 观察前方车辆数/pcu 1.0 2.0 3.0 4.0 2.0 暂时走神持续时间/s 0.3 0.6 0.9 1.2 1.0 暂时走神概率/% 1.0 2.0 3.0 4.0 4.0 换道模型 最大减速度/(m/s2) 2.0 3.0 4.0 5.0 5.0 -1 m/s2的距离/m 100 80 60 40 40 可接受的减速度/(m/s2) 1.0 1.5 2.0 2.5 3.0 等待换道消失时间/s 45.0 60 75.0 90 60 最小车头时距/m 0.5 0.8 1.0 1.25 1.5 协调刹车的最大减速度/(m/s2) 3.0 2.6 2.2 1.8 1.6
下载: 导出CSV
表 3 模型验证结果
Table 3. Results of model validation
标定指标 速度/(m/s) 位置/m ME MAE MARE RMSE ME MAE MARE RMSE 计算值 -0.16 2.14 0.06 2.43 0.17 1.86 0.04 2.17
下载: 导出CSV
表 4 仿真输出结果
Table 4. Simulation output result
影响因素 1级 2级 3级 4级 现状 最大饱和通行能力/[pcu/(h/ln)] 2 284 1 916 1 675 1 562 1 308 纵向车距/m 3.25 3.55 3.72 3.94 4.32 横向车距/m 1.83 1.96 2.16 2.31 2.48 最优速度样本量/pcu 921 903 831 798 541 车辆平均横向偏移距离/cm 21.94 22.86 24.28 25.34 26.54 注: 大型车换算系数取2.0[26]。
下载: 导出CSV
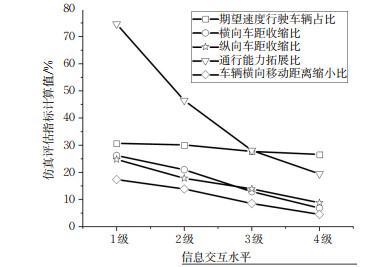
表 5 仿真评价指标计算值
Table 5. Calculated values of simulation evaluation indices
% 对比参数 1级 2级 3级 4级 现状 期望速度行驶车辆占比 30.70 30.10 27.70 26.6 18.0 横向车距收缩比 26.21 20.97 12.90 6.85 纵向车距收缩比 24.77 17.82 13.89 8.80 车辆横向偏移距离缩小比 17.33 13.87 8.53 4.53 通行能力拓展比 74.62 46.48 28.06 19.42
下载: 导出CSV
-
[1] 北京市统计局, 国家统计局北京调查总队. 北京市2019年国民经济和社会发展统计公报[R/OL]. (2020-03-02)[2021-01-11]. http://tjj.beijing.gov.cn.Beijing Municipal Bureau of Statistics, National Bureau of Statistics Beijing Survey Team. Statistical Bulletin of Beijing's 2019 National Economic and Social Development[R/OL]. (2020-03-02)[2021-01-11]. http://tjj.beijing.gov.cn. (in Chinese) [2] 李敢. 基于MPC的快速路协同控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.LI Gan. Research on integrated control strategy of expressway based on MPC[D]. Harbin: Harbin Institute of Technology, 2017. (in Chinese) [3] 王世广. 数据驱动的城市路网结构与功能特性关联分析[D]. 长春: 吉林大学, 2019.WANG Shiguang. Data-driven correlation analysis of structural and functional characteristics of the urban road networks[D]. Changchun: Jilin university, 2019. (in Chinese) [4] 潘岳, 周兴壮, 欧力, 等. 简析车路协同自动驾驶系统的关键技术[J]. 科学技术创新, 2020(19): 50-52. doi: 10.3969/j.issn.1673-1328.2020.19.030PAN Yue, ZHOU Xingzhaung, OU Li, et al. Brief analysis of the key technologies of the vehicle-road cooperative automatic driving system[J]. Scientific and Technological Innovation, 2020(19): 50-52. (in Chinese) doi: 10.3969/j.issn.1673-1328.2020.19.030 [5] 郭戈, 许阳光, 徐涛, 等. 网联共享车路协同智能交通系统综述[J]. 控制与决策, 2019, 34(11): 2375-2389.GUO Ge, XU Yangguang, XU Tao, et al. A survey of connected shared vehicle-road cooperative intelligent transportation systems[J]. Control and Decision, 2019, 34(11): 2375-2389. (in Chinese) [6] 时晨皓. 车联网通信中的协同优化机制研究及仿真评估[D]. 开封: 河南大学, 2018.SHI Chenhao. Research and simulation evaluation of collaborative optimization mechanism in vehicular networking communications[D]. Kaifeng: Henan University, 2018. (in Chinese) [7] GULER S I, MENENDEZ M, MEIER L. Using connected vehicle technology to improve the efficiency of intersections[J]. Transportation Research Part C: Emerging Technologies, 2014, 46: 121-131. doi: 10.1016/j.trc.2014.05.008 [8] HARTMANN M, Motamedidehkordi N, Krause S, et al. Impact of automated vehicles on capacity of the German freeway network[C]. ITS World Congress, Montreal, Canada: ITS Canada, 2017. [9] BUJANOVIC P, LOCHRANE T. Capacity predictions and capacity passenger car equivalents of platooning vehicles on basic segments[J]. Journal of Transportation Engineering, Part A: Systems, 2018, 144(10): 04018063. doi: 10.1061/JTEPBS.0000188 [10] 王振华. 车路协同环境下城市道路交织区驾驶行为特性及控制策略研究[D]. 北京: 北京工业大学, 2016.WANG Zhenhua. Research on driving behavior characteristic and control strategy of weaving area under urban V2V/V2I Environment[D]. Beijing: Beijing University of Technology, 2016. (in Chinese) [11] 陈霞. 基于车路协同的道路交通信息采集与状态评价方法研究[D]. 济南: 山东大学, 2015.CHEN Xia. Research on road traffic information collection and state evaluation method based on CVIS[D]. Jinan: Shandong University, 2015. (in Chinese) [12] 曾华倩. V2V条件下的车辆队列跟驰行为建模与仿真实现[D]. 西安: 长安大学, 2018.ZENG Huaqian. Modeling and simulation of vehicle platoon following behavior under the condition of V2V[D]. Xi'an: Chang'an University, 2018. (in Chinese) [13] KONG D W, GUO X C, SUN L S, et al. The methods of analysis and calculation of the influence of the heavy vehicles on the driver in the rear vehicle[C]. The 19th COTA International Conference of Transportation Professionals, Nanjing: ASCE, 2019. [14] 张驰, 罗昱伟, 白浩晨, 等. 多车道匝道视距评价与优化方法研究[J]. 交通信息与安全, 2019, 37(6): 32-39+78. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201906005.htmZHANG Chi, LUO Yuwei, BAI Haochen, et al. Evaluation and optimization of sight distance of multi-lane ramp[J]. Journal of Transport Information and Safety, 2019, 37(6): 32-39 + 78. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201906005.htm [15] 徐桃让, 姚志洪, 蒋阳升, 等. 智能网联车环境下考虑反应时间影响的基本图模型[J]. 公路交通科技, 2020, 37(8): 108-117. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK202008014.htmXU Taorang, YAO Zhihong, JIANG Yangsheng, et al. Fundamental diagram model of considering reaction time in environment of intelligent connected Vehicles[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 108-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK202008014.htm [16] XIE Yuanchang, ZHANG Huixing, GARTNER N H, et al. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment[J]. Journal of Intelligent Transportation Systems: Technology, Planning, and Operations, 2017, 21(2): 136-147. doi: 10.1080/15472450.2016.1248288 [17] 谢辉. 车路协同环境下的车辆跟驰行为研究[J]. 公路, 2019, 64(8): 317-320. https://www.cnki.com.cn/Article/CJFDTOTAL-GLGL201908062.htmXIE Hui. Research on car-following behavior in vehicle-road cooperative environment[J]. Highway, 2019, 64(8): 317-320. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLGL201908062.htm [18] 张耀伟, 李振龙, 赵晓华, 等. 车路协同下HMI对跟驰行为与视觉特性的影响[J]. 交通信息与安全, 2020, 38(2): 9-16. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS202002005.htmZHANG Yaowei, LI Zhenlong, ZHAO Xiaohua, et al. Influences of HMI on car following behaviors and visual characteristics in cooperative vehicle infrastructure system[J]. Journal of Transport Information and Safety, 2020, 38(2): 9-16. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS202002005.htm [19] WIEDEMANN R, REITER U. Microscopic traffic simulation: the simulation system mission, background and actual state[R]. Brussels: CEC, 1991. [20] PTV Group. PTV Vissim 7.00 User's Manual[Z]. Karlsruhe, Germany: 2015. [21] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. (in Chinese) doi: 10.3969/j.issn.1674-8484.2017.01.001 [22] KONG D W, GEORGE F L, GUO X C, et al. Modeling vehicle car-following behavior in congested traffic conditions based on different vehicle combinations[J]. Transportation Letters: The International Journal of Transportation Research, 2018, 10(5): 280-293. doi: 10.1080/19427867.2016.1262979 [23] BROCKFELD E, KÜHNE R D, WAGNER P. Calibration and validation of microscopic models of traffic flow[J]. Transportation Research Record, 2005, 1934(1): 179-87. doi: 10.1177/0361198105193400119 [24] 王殿海, 陶鹏飞, 金盛, 等. 跟驰模型参数标定及验证方法[J]. 吉林大学学报(工学版), 2011, 41(1): 59-65.WANG Dianhai, TAO Pengfei, JIN Sheng, et al. Method of calibrating and validating car-following model[J]. Journal of Jilin University(Engineering and Technology Edition), 2011, 41(1): 59-65. (in Chinese) [25] 胡婷. 面向快速路交织区的微观交通仿真模型标定研究[D]. 北京: 北京交通大学, 2010.HU Ting. Calibration of microscopic traffic simulation model for weaving sections expressway[D]. Beijing: Beijing Jiaotong University, 2010. (in Chinese) [26] 中华人民共和国住房和城乡建设部. 城市道路工程设计规范: CJJ 37—2012[S]. 北京: 中国建筑工业出版社, 2012.Ministry of Housing and Urban-Rural Development, People's Republic of China. Code for design of urban road engineering: CJJ 37—2012[S]. Beijing: China Architecture & Building Press, 2012. (in Chinese) [27] 薛峰. 城市快速路微观交通系统仿真建模[D]. 上海: 华东师范大学, 2010.XUE Feng. Microscopic traffic simulation modeling for urban freeway[D]. Shanghai: East China Normal University, 2010. (in Chinese) [28] 侯明瑜, 黄衡, 程建川. 基于无人机航拍技术的城市主干路直线段车辆运行特征研究[J]. 交通信息与安全, 2019, 37(3): 51-60. doi: 10.3963/j.issn.1674-4861.2019.03.007HOU Mingyu, HUANG Heng, CHENG Jianchuan. Operation characteristics of vehicles in straight section of urban arterial road based on drone technique[J]. Journal of Transport Information and Safety, 2019, 37(3): 51-60. (in Chinese) doi: 10.3963/j.issn.1674-4861.2019.03.007 [29] 刘丁贝, 张心睿, 王润民, 等. 封闭测试场条件下基于DSRC的车联网通信性能测试[J]. 汽车工程学报, 2020, 10(3): 180-187. doi: 10.3969/j.issn.2095-1469.2020.03.04LIU Dingbei, ZHANG Xinrui, WANG Runmin, et al. DSRC-based vehicle network communication performance in closed field test[J]. Chinese Journal of Automotive Engineering, 2020, 10(3): 180-187. (in Chinese) doi: 10.3969/j.issn.2095-1469.2020.03.04 [30] MELSON C L, LEVIN M W, HAMMIT B E, et al. Dynamic traffic assignment of cooperative adaptive cruise control[J]. Transportation Research Part C: Emerging Technologies, 2018, (90): 114-133. http://www.sciencedirect.com/science/article/pii/S0968090X18302778 [31] 林庆峰, 王兆杰, 鲁光泉. L3级自动驾驶汽车的接管安全性评价模型[J]. 汽车工程, 2019, 41(11): 1258-1264.LIN Qingfeng, WANG Zhaojie, LU Guangquan. Takeover safety evaluation model for level 3 automated vehicles[J]. Automotive Engineering, 2019, 41(11): 1258-1264. (in Chinese) -


 点击查看大图
点击查看大图

计量
- 文章访问数: 946
- HTML全文浏览量: 539
- PDF下载量: 31
- 被引次数: 0