Abstract:
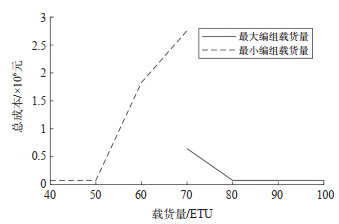
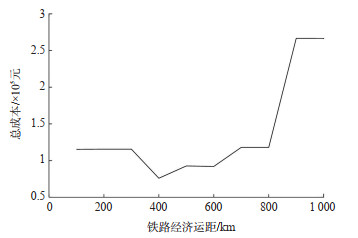
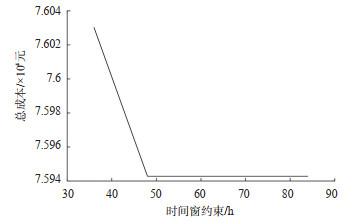
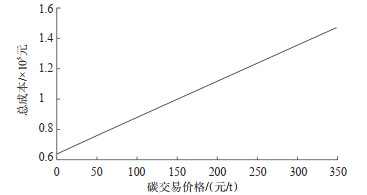
Currently, a high proportion of the express delivery service in China is carried out through road transportation, which has led to the following issues, including an excessive traffic demand, a high transportation cost, and high carbon emission. Aiming to address these issues, an operation scheme for regular train services for transporting containers (RTS-TC) under"dual carbon"goals is studied. Considering the factors such as transportation distance, express delivery volume, the number of express delivery outlets, and the contribution of the logistics industry to overall GDP, an entropy weighting method is employed to determine the origin and destination stations for RTS-TC. Based on two types of transportation, highway transit only and transfer to railway stations, a transportation network for RTS-CT is developed, including the origins, transfers, and arrival stations. To determine the scheme for direct transit, the transfer scheme, and the corresponding transportation mode, an integer programming model is developed for the operation scheme of RTS-TC. To determine the reasonable number of RTS-TC formations and the railway economic distance, the model minimizes the transportation costs, transfer costs, and carbon emission costs. The optimization considers the factors such as the express delivery volume, time constraints, and train operation conditions, as well as the transfer process of express goods. Additionally, the model incorporates elements such as the carbon emission coefficient and carbon trading prices to calculate the carbon emission costs. A case study is conducted using the express freight flow distribution in the Yangtze River Delta region. The results show that the operation scheme for RTS-TC primarily adopts the mode of direct transportation with the transfer mode as a secondary option. According to the cargo capacity and railway economic distance, the railway transportation is preferred over the road transportation. The reasonable number of wagons for RTS-TC formations is between 25 and 40, as an excessively large or small number of RTS-TC formations is not advantageous. Under the condition of a railway speed of 120 km/h, a railway economic distance of 400 km is considered optimal. The constraint of a scientifically designed time window can also further optimize the operation scheme for RTS-TC. Compared to the current road transportation, the proposed schemes in this research significantly reduce the transportation costs and the carbon emission costs, while ensuring the transportation timeliness.