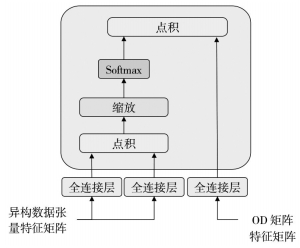
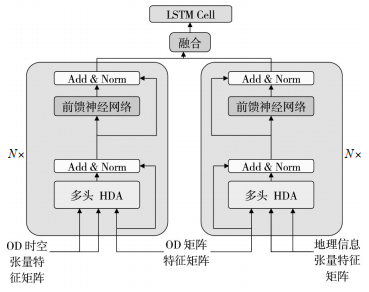
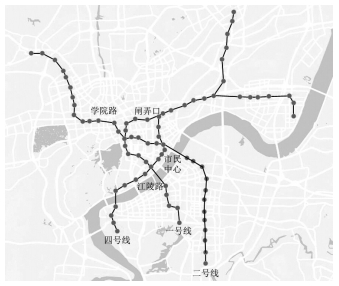
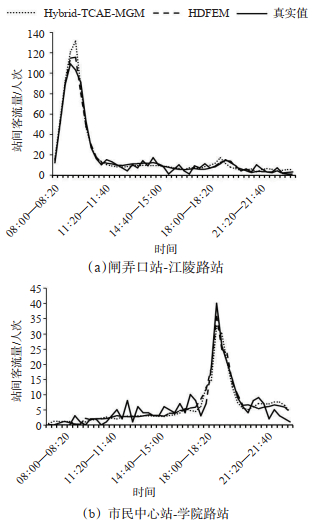
摘要: 城市轨道交通起讫点(origin-destination,OD)客流短时预测在智能交通系统中意义重大,它为交通管控策略实施以及出行者出行选择提供了重要的决策依据。卷积神经网络被广泛用于交通数据空间相关性提取,但其平移不变性与局部敏感性导致该方法更重视局部特征而忽视全局特征。本研究构建了基于注意力机制的异构数据特征提取机模型(heterogeneous data feature extraction machine,HDFEM)以实现OD矩阵空间相关性的全局感知。该模型从时空特征和用地属性特征出发,构造异构数据OD时空张量与地理信息张量,依托模型张量编码层对异构数据张量进行分割与编码,通过注意力机制连接各张量块特征,提取OD矩阵中各个部分间的空间相关性。该方法不仅实现了异构数据与OD客流数据的融合,还兼顾了卷积神经网络模型未能处理的OD矩阵远距离特征,进而帮助模型更全面地学习OD客流的空间特征。对于OD时序特性,该模型使用了长短时记忆网络来处理。在杭州地铁自动售检票系统(auto fare collection,AFC)数据集上的实验结果表明:HDFEM模型相对于基于卷积神经网络的预测模型,其均方误差、平均绝对误差与标准均方根误差分别下降了4.1%,2.5%,2%,验证了全局OD特征感知对于城市轨道交通OD客流预测的重要性。