摘要:
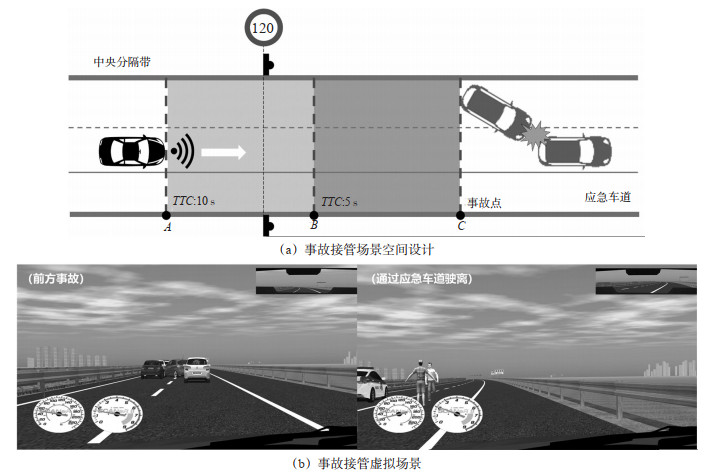
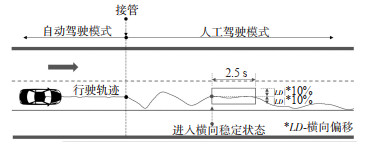
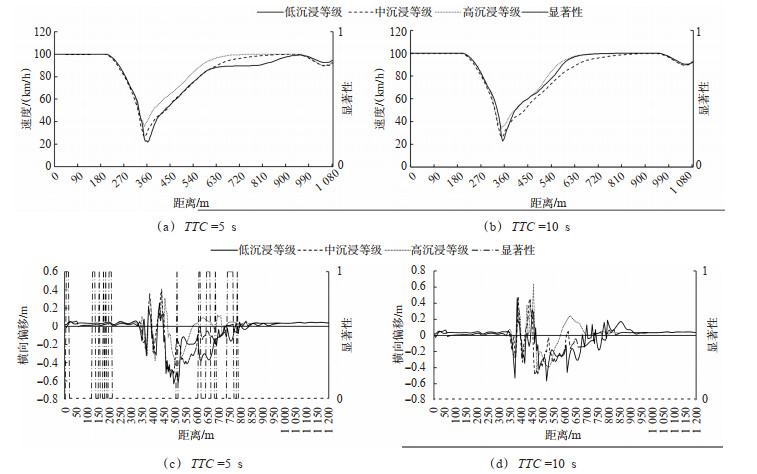
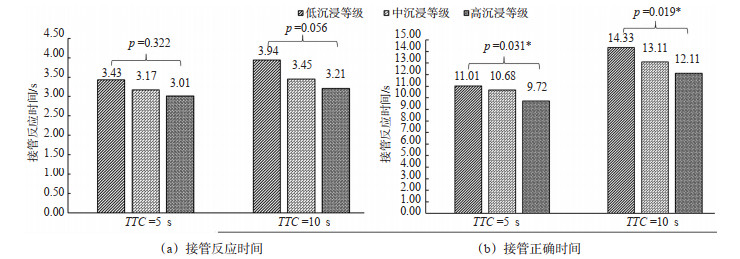
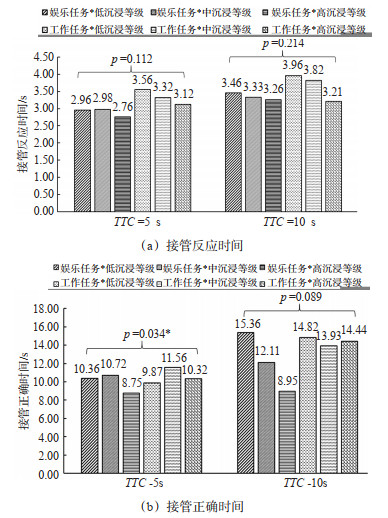
为探究自动驾驶中驾驶次任务沉浸等级对接管行为的影响,基于驾驶模拟器搭建自动驾驶接管行为测试平台,设计事故接管场景,基于驾驶次任务(娱乐任务和工作任务)和接管请求时间(5 s和10 s)因素组合开发4个事故接管情景,招募被试参与驾驶模拟实验并采集驾驶人的接管行为数据,选择速度、横向偏移、接管反应时间和接管正确时间4个指标衡量接管行为。研究结果表明:①速度随着驾驶次任务沉浸等级的降低而降低,接管车辆后的降速幅度随之增大;接管请求时间为5 s时,驾驶次任务沉浸等级对横向偏移具有显著影响;②接管请求时间为10 s时,驾驶次任务沉浸等级对接管反应时间具有弱显著性(p = 0.056 < 0.1), 接管反应时间随着驾驶次任务沉浸等级的增加而逐级降低(低沉浸等级=3.94 s;中沉浸等级=3.45 s;高沉浸等级=3.21 s);驾驶次任务沉浸等级对接管正确时间均具有统计学差异(5 s时:p =0.031 < 0.05;10 s时:p =0.019 < 0.05),接管正确时间随着驾驶次任务沉浸等级的上升而降低;③在相同驾驶次任务条件下,接管反应时间随着驾驶次任务沉浸等级的升高而降低,统计结果表明驾驶次任务与驾驶次任务沉浸等级的交互作用对接管反应时间无统计学差异,而对接管正确时间具有显著影响。