摘要:
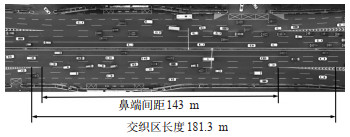
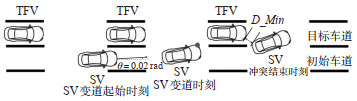
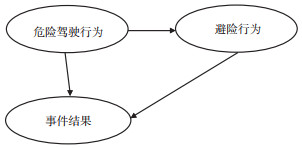
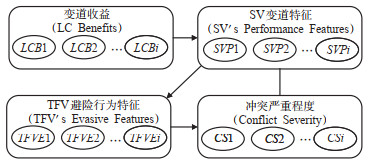
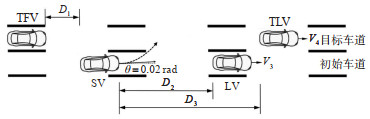
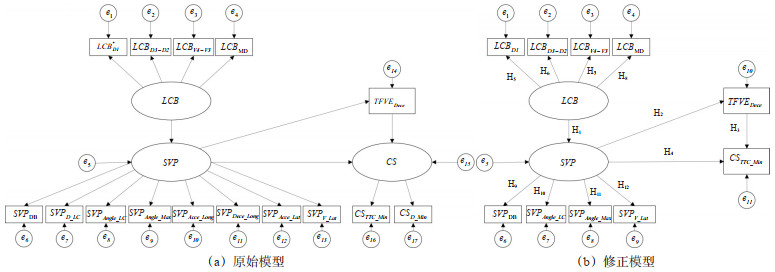
驾驶人的强行变道行为对交通安全具有较大影响。为研究快速路交织区驾驶人强行变道行为引发交通冲突的机理、提升变道场景的安全性,本研究选取变道收益、变道车辆特征、目标车道后方来车避险特征、交通冲突严重程度4个变量构建了结构方程模型(structural equation model, SEM)。选取南京市1处快速路交织区为研究区域,通过无人机采集200个强行变道行为样本,并从中提取高精度车辆轨迹数据,分析了强行变道行为引发交通冲突的微观机理与关键特征指标。基于最小碰撞时间评估交通冲突的严重程度, 以结构模型分析强行变道各环节因素引发事故风险的因果链路, 提出压迫式、侵入式2种强行变道形态, 综合考虑表征车辆变道收益与变道特征的多项微观指标,建立测量模型。SEM分析表明:变道收益显著影响变道车辆特征(p = 0.044);变道车辆特征显著影响后方来车避险特征(p = 0.001)与交通冲突严重程度(p = 0.021);后方来车避险特征显著影响交通冲突严重程度(p < 0.001)。在变道起始时刻,变道车辆与目标车道后车间距(p = 0.002)、相邻车道前车速度差(p = 0.012)与变道动机(p < 0.001)可以有效表征变道收益; 在变道过程中,驾驶人危险行为特征、车辆横摆角、横向速度均可有效表征变道车辆特征(p < 0.001)。研究结果为微观视角下刻画车辆强行变道风险提供了有效指标,可为车载碰撞预警系统与短距离交织区交通设计提供理论支撑。