Abstract:
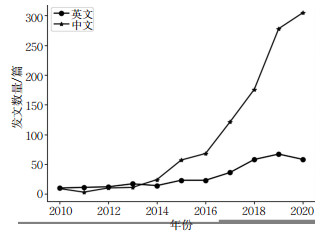
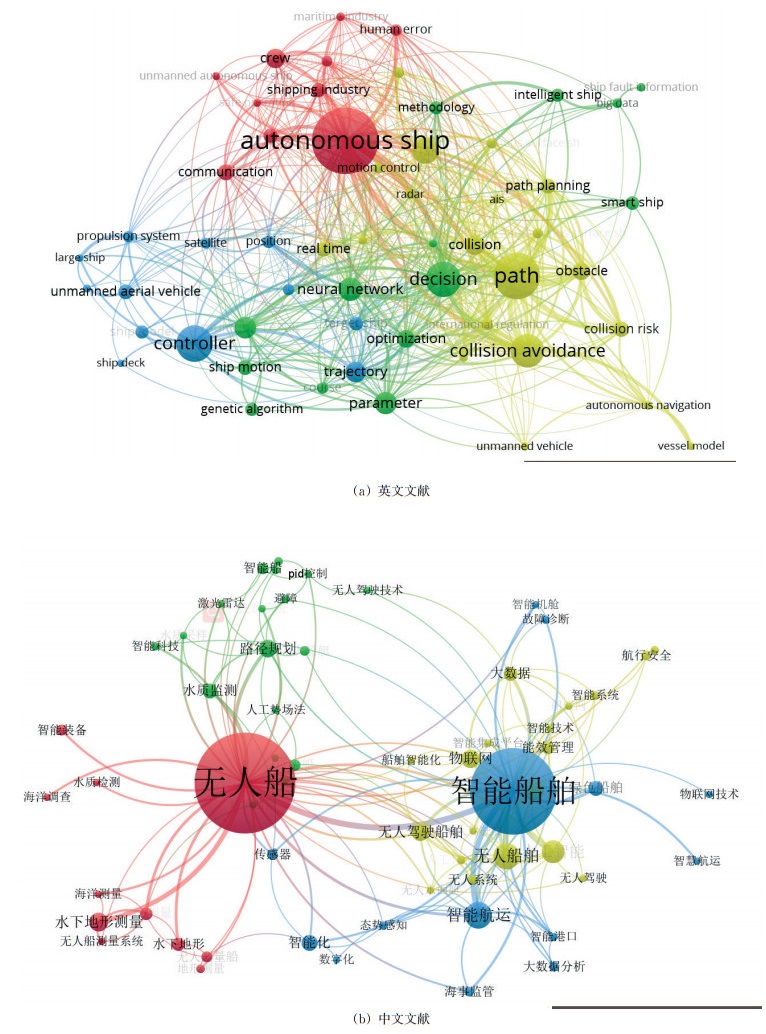
This paper conducts a comprehensive literature review of intelligent ship based on the studies published on the China Knowledge Network (CNKI) and Web of Science databases to investigate the status quo and the cutting, edge issues in development of intelligent ship.The knowledge graphs are used to systematically present the trends, frontiers, and hot spots in intelligent ship from time, author, institution, and keywords.On this basis, the research trends and hot issues of intelligent ship are analyzed from intelligent situational awareness, collision avoidance, intelligent control, network communication, and the rule of law study. Besides, three key research directions are proposed, including human, machine integration and decision, making technology for intelligent ship, risks of formation navigation, and risk evaluation of mixing navigation of traditional/intelligent ships. The results show that since 2015, published papers related to intelligent ship have increased more rapidly than which between 2010 and 2014, with an average growth rate of 58%(more than 14 articles per year). Key research institutions in China contributing the most to this field include Wuhan University of Technology, Dalian Maritime University, and Shanghai Jiaotong University. Major foreign research institutions include Norwegian University of Science and Technology and Delft University of Technology. Research hotspots in intelligent ship refer to situational awareness, intelligent collision avoidance, intelligent control, network communication security, and legal security.