摘要:
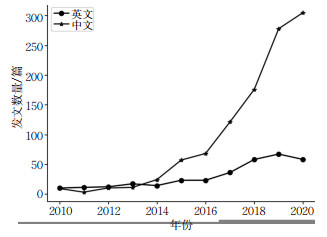
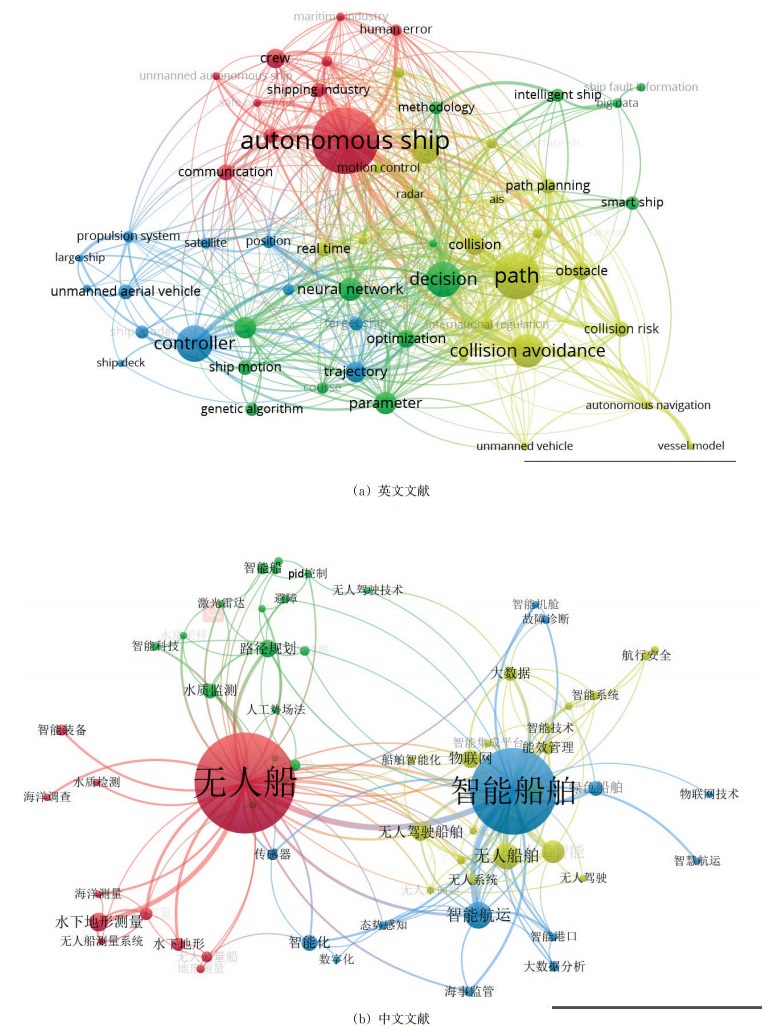
为了更好地把握智能船舶研究领域的前沿问题及发展现状, 针对智能船舶领域相关主题, 基于中国知网(CNKI)和Web of Science数据库中2010-2020年的文献检索结果, 运用知识图谱从计量统计的角度从时间、作者、机构以及关键词4个方面系统地呈现了智能船舶领域发展的趋势、前沿和热点。在此基础上, 从智能船舶的态势感知、智能避碰、智能控制、网络通信和法律规则研究5个研究方向分析了智能船舶研究趋势和热点问题, 并提出了智能船舶人机共融及决策技术研究、编队航行风险研究以及传统/智能船舶混行风险评价研究这3个重点研究方向。研究结果表明, 从2015年开始, 智能船舶相关研究文章快速增长, 增长幅度在每年14篇以上, 平均增长率达58%; 国内智能船舶主要研究机构包括武汉理工大学、大连海事大学、上海交通大学等, 国外主要研究机构包括挪威科技大学和代尔夫特理工大学; 智能船舶领域的研究热点包括态势感知、智能避碰、智能控制、网络通信安全和法律安全。